简单读懂滴滴、uber押宝的无人驾驶
滴滴和uber,作为我们印象中单纯的“打车软件”,却不约而同地开始涉及自动驾驶,为什么?我相信每个人的都有自己的看法,不过这不是这篇文的重点。这篇文想谈论的,是他们的无人车项目究竟能否实现、怎么实现。针对这些,相信很多朋友同样抱有疑问。那么接下来这些纯“干货”,一定会让你有所收获。

滴滴和uber
环境感知——无人驾驶实现的基础
当下的任何系统性工程,都是软件与硬件相结合的产物。对于无人驾驶来说,其软件方面主要有高精度地图和行车算法;而对于硬件来说,则主要为探测器和控制器。这个探测器并非指某一个器件,而是指车辆上的整套环境感知系统。任何无人驾驶车辆,只有在确切掌握车身周围的环境后,才有可能进行无人操作。
目前在高等级(L4~L5)自动驾驶的实现上,探测系统主要有三种方案。其一是以视觉系统为主、毫米波雷达和传感器为辅的视觉优先方案,代表企业有特斯拉、Mobileye等;其二是以单个高线数激光雷达(LiDAR)为主、摄像头、毫米波雷达和传感器为辅的LiDAR优先方案,代表企业有Waymo、uber、滴滴等;其三是以多个低线数激光雷达、摄像头、毫米波雷达和传感器相互融合的多传感器融合方案,代表企业有苹果、通用Cruise等。这三种解决方案,虽然都针对同一个目的,但由于侧重点的不同,相应的表现也颇为不同。
LiDAR优先方案——用光感知世界
在这里,我们着重来讲一下被滴滴和uber采用的LiDAR优先方案。LiDAR指的是激光雷达,和摄像头这类被动传感器相比,激光雷达可以主动探测周围环境。通常,采用LiDAR优先方案的车型都有一个显著的特征,那就是车顶上有且只有一个较大的圆柱体,就像下图这样:
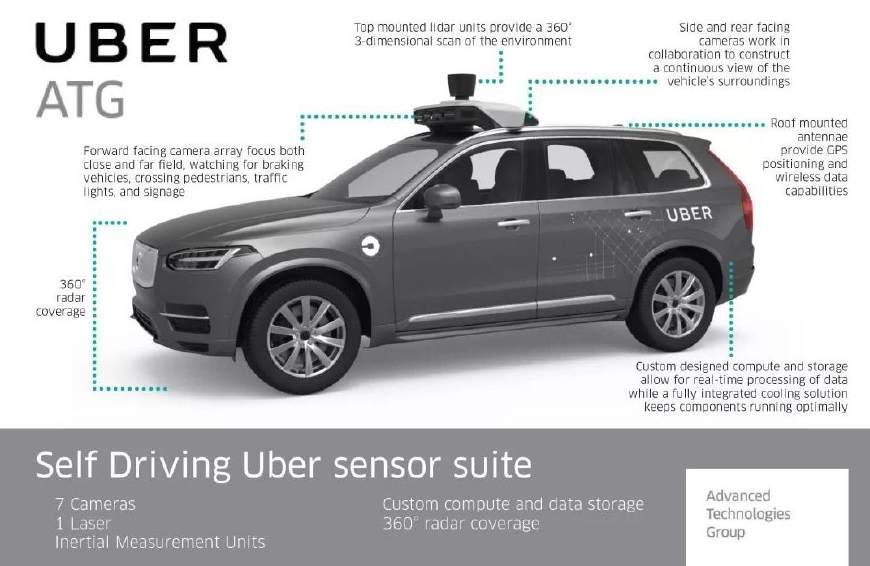
头顶“大桶”的uber无人车
在uber无人车车顶上那个黑色圆柱体内就是该车搭载的主要探测器——激光雷达。它通过快速旋转和投射/接收激光光束来判断周围环境中的物体与自身的距离,并以此生成点云,并进一步完成对周围环境的3D建模。而这个建模的精细程度则与LiDAR同时可以投射的激光线束数量成正比。
快速旋转并扫描的LiDAR
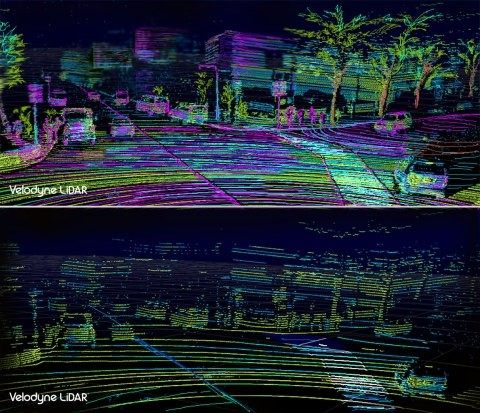
上下分别为128线与64线LiDAR生成的点云
因为激光光束更加聚拢,所以它要比传统的雷达拥有更高的探测精度和更远的距离(最远可达200米)。在自动驾驶汽车行驶过程中,激光雷达可以实时感知周围环境,包括前后车、行人以及任何障碍物,生成数据并交由软件判断,再配合高精度地图和GPS,可以让汽车精确地定位自身位置,并对接下来的行动进行进一步的规划。
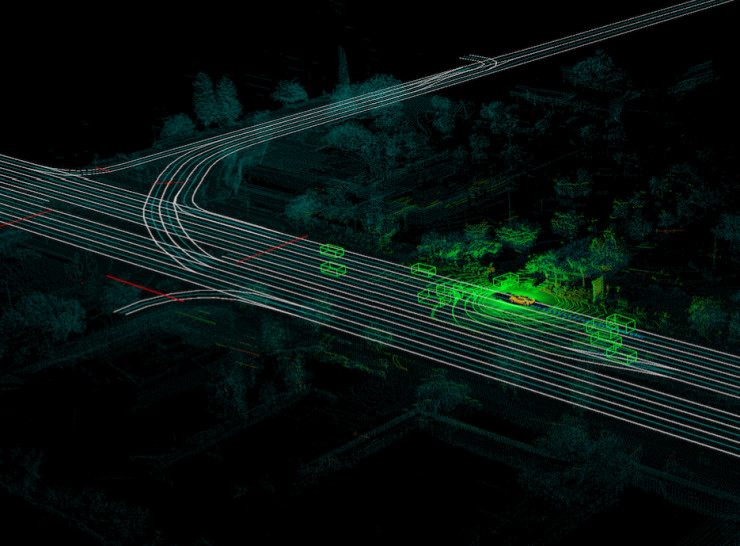
与高精度地图相结合
LiDAR望远、雷达探近、摄像头识色,相辅相成
当然,激光雷达也有明显的缺点,就比如大雪和大雾可能会遮挡激光雷达的激光,其准确度会随着射程的降低而降低;由于光线是直线传播的,这就导致在车身周围将有较大的探测盲区;激光雷达非常适用于探测物体的形状和距离,但它不适合阅读标志,弄清楚是什么颜色,等等。

图中部的黑色区域为激光雷达的盲区
所以,为了弥补感知系统对盲区内的探知,就不可避免的要在车身周围搭载更多的辅助型传感器,就比如摄像头和毫米波雷达等。
对于摄像头来说,阅读标志和识别物体是它的主要工作,它拥有先进的计算机视觉算法,能够实时在其图像上运行。自动驾驶车辆上的摄像头可以看到前面刹车的车辆(突然红灯),交通信号灯,过街行人等信息模式。尤其是在汽车的前端,会使用多个角度和类型的摄像头,以便全面了解汽车驾驶的场景。
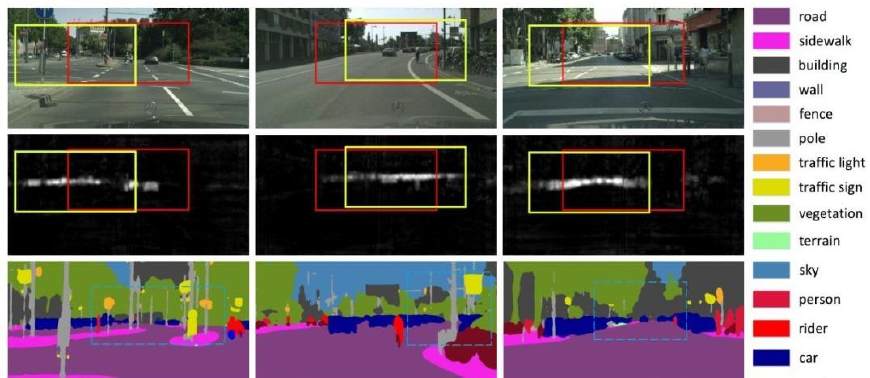
摄像头通过算法对场景内的物体进行识别
而毫米波雷达也像激光雷达一样发出信号并等待其反弹,但它使用无线电波而不是光。这让它更能抵抗干扰,因为无线电可以穿过雪和雾,但相比激光所能探测的距离要近很多,所以一般用于近距离感知。
滴滴效仿,只因成熟可靠
大范围与小范围相结合、远距离与近距离相结合、视觉与光/波相结合,当然,还有软硬件相结合,这就是uber无人车能够行驶在路上的奥秘。而近期放话也要大力发展无人驾驶的滴滴,通过其官方放出的无人车外观来看,采用的也是与uber相类似的方案。

滴滴无人车同样头顶“大桶”
滴滴之所以也要效仿uber,我们可以从去年的《自动驾驶脱离报告》(根据相关法律法规,获得允许在加州测试自动驾驶汽车的公司,必须每年披露司机控制汽车的次数。)中得到答案:采用同样方案的Waymo无人车每千英里的“脱离”次数仅有0.18次,远高于行业平均水平。这说明这套方案足够成熟且可靠。

数据引自雷锋网新智驾
当然,这套方案有一个巨大的问题,那就是高昂的成本。高线数激光雷达的价格十分高昂,甚至在原型车的成本中,它往往要占比超过50%。以64线的Velodyne激光雷达为例,其单个器件的价格就高达8万美元,这在美国几乎是一辆保时捷911跑车的售价。
但无论如何,滴滴和uber的选择至少是一种比较稳妥的方案,或许不久之后,我们叫来的滴滴快车上,就已经不再有司机了。

{var%20f='http://v.t.sina.com.cn/share/share.php?appkey=1515056452',u=z||d.location,p=['&url=',e(u),'&title=',e(t||d.title),'&source=',e(r),'&sourceUrl=',e(l),'&content=',c||'gb2312','&pic=',e(p||'')].join('');function%20a(){if(!window.open([f,p].join(''),'mb',['toolbar=0,status=0,resizable=1,width=440,height=430,left=',(s.width-440)/2,',top=',(s.height-430)/2].join('')))u.href=[f,p].join('');};if(/Firefox/.test(navigator.userAgent))setTimeout(a,0);else%20a();})(screen,document,encodeURIComponent,'','','http://www.evask360.com//data/attach/topic/topicS4AFKC.jpg', '推荐 知士小管家@Tengu 的文章《简单读懂滴滴、uber押宝的无人驾驶》','http://www.evask360.com/article-11.html','页面编码gb2312|utf-8默认gb2312'));){kind=link}